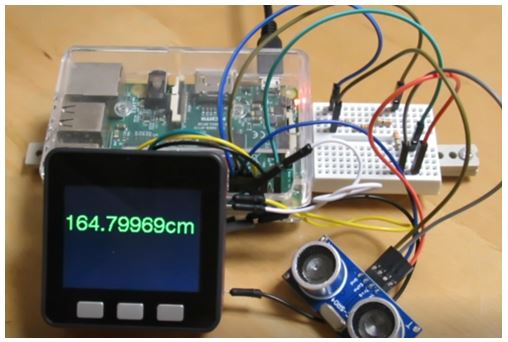
ゴール設定(M5stackの画面にデータを表示する)
ラズパイ(Raspberry Pi)で取得した温度データ、距離センサデータなどをM5stackの画面に表示したい。M5stackにはWifi通信機能が付いているが、今回のデータ通信は、あえてシリアル通信とする。M5stackのボタンを押してテキストでコマンドをラズパイに送信すると、ラズパイからM5stackに数値データが返信されてくるというスクリプトを書く。
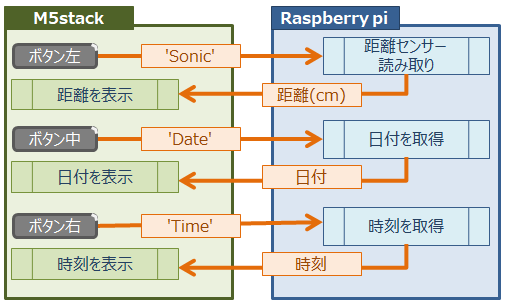
事前準備(データ通信のコマンドを決める)
M5stackの画面に表示するデータをラズパイから送信したい。M5stackのボタン3つに音波距離センサーの’Sonic’や’Date’、’Time’というテキストを送信するスクリプトを割り当てする。ラズパイはそれらのテキストを受信したら、対応するスクリプトを実行して結果をM5stackへ送信する。M5stackはループ処理でデータ受信を調べ、ラズパイはデータ受信を割り込み処理で受け付ける。
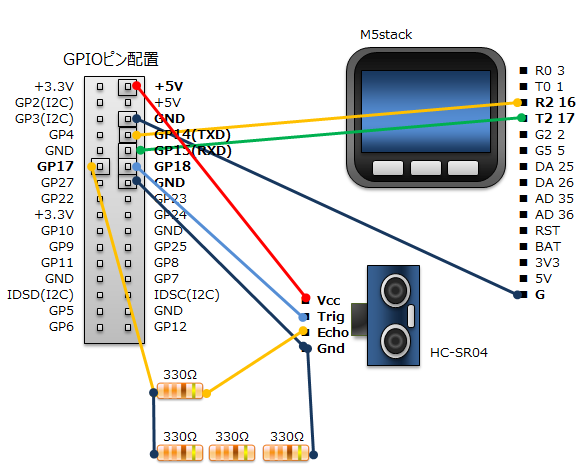
配線図
準備(ラズパイ側のスクリプト)
最初に[ttyAMA0]を無効にしておくこと。
$ sudo systemctl status serial-getty@ttyAMA0.service
$ sudo systemctl stop serial-getty@ttyAMA0.service
$ sudo systemctl disable serial-getty@ttyAMA0.service
pythonで書いたラズパイ側のスクリプト。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import serial
import threading
import datetime
import time
import wiringpi as pi
serCom = serial.Serial('/dev/ttyAMA0', 115200, timeout = 1 )
class serialRead():
def __init__(self):
self.threadRead = threading.Thread( target = self.target )
self.threadRead.start()
def target(self):
flag=True
while flag:
if( serCom.inWaiting() > 0 ):
strC = serCom.read( serCom.inWaiting() )
print( "[%s]" % strC )
if( strC == "Sonic"):
num = 0
while num < 10:
num = num + 1
strDistance = mesure()
serCom.write( strDistance )
print( strDistance )
time.sleep(1.0)
if( strC == "Date" ):
objDate = datetime.date.today()
strDate = objDate.strftime("%Y/%m/%d")
serCom.write(strDate)
print(strDate)
if( strC == "Time"):
objTime = datetime.datetime.now()
strTime = objTime.strftime("%H:%M:%S")
serCom.write(strTime)
print(strTime)
def quit(self):
flag=False
def main():
print( "Start reading..." , serCom.portstr )
while True:
try:
strA = raw_input("send: ")
serCom.write( strA )
print( "[%s] sent" % strA )
if( strA == "exit" ):
serCom.close()
threadRead.quit()
exit()
except:
serCom.close()
threadRead.quit()
exit()
def sonicInit():
global TRIG_PIN
global ECHO_PIN
global pi
TRIG_PIN = 18
ECHO_PIN = 17
pi.wiringPiSetupGpio()
pi.pinMode( TRIG_PIN, pi.OUTPUT )
pi.pinMode( ECHO_PIN, pi.INPUT )
pi.digitalWrite( TRIG_PIN, pi.LOW )
def mesure():
pi.digitalWrite( TRIG_PIN, pi.HIGH )
time.sleep(0.00001)
pi.digitalWrite( TRIG_PIN, pi.LOW )
while ( pi.digitalRead( ECHO_PIN ) == pi.LOW ):
sigoff = time.time()
while ( pi.digitalRead( ECHO_PIN ) == 1 ):
sigon = time.time()
strTemp = str( round((( sigon - sigoff ) * 34000) / 2, 5 )) + "cm"
time.sleep(1.0)
return ( strTemp )
if __name__ == '__main__':
sonicInit()
threadRead = serialRead()
main()続く・・・
閲覧権限のみのユーザーだが、コメント追加できるのか(テスト)
失敗。閲覧権限のみだが、投稿できてしまった。できないように修正すること。
一般ユーザーは閲覧のみ。
購読者登録したユーザーは、コメント投稿できる
投稿者承認されたユーザーは、記事投稿できる