




HOゲージ自動運転#0 初めに
鉄道模型の自動運転を通じてメカトロニクス制御の基本を学ぶ
オープン制御とクローズド制御について学ぶ
以下、全体について説明する。製作の詳細は個別のページで説明する。
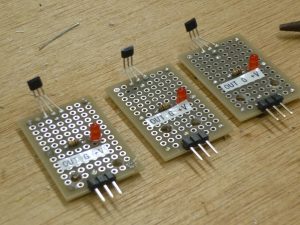
ホールICを用いた磁気センサの製作
時期が近づくと信号が出るホールICを使った磁気センサを製作した。しかし、USBで給電が必要でコードの作成が大変だったことと、部品が多いことから最終的にリードスイッチ式の磁気センサにすることとなった。
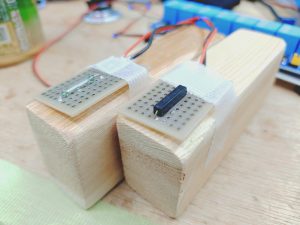
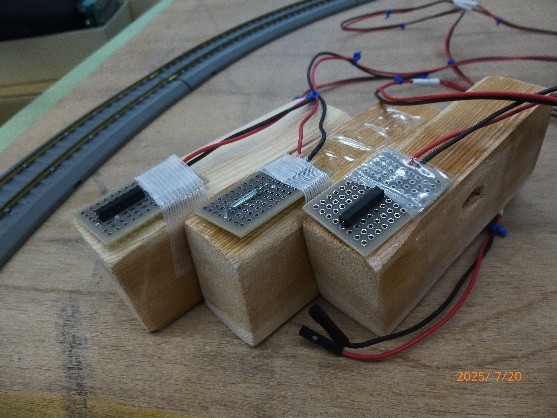
リードスイッチを用いた磁気センサ
ホールICを使うことは難しいことがわかったため、磁力に反応して中の接点が繋がり電流が流れるようになるリードスイッチを使うこととした。リードスイッチは電源が入らず、小さい基板からただ線を両端につければいいだけなので簡単に作ることができた。写真左の硝子製のリードスイッチは割れやすく、幾つか壊してしまったため製作後半のものは写真右のプラスチック製のリードスイッチを使った。
HOゲージの修理・線路清掃
HOゲージを子供時代に楽しんでいた人生の先輩に、大変ありがたいことにHOゲージを寄贈していただいた。しかし数十年動かしていないため、メンテナンスをした。具体的には、鉄道模型の電気機関車を分解して車輪部分の修理をしたり、レールが錆びていたため、電気がよく通るように無水アルコールで拭いたり等を行った。

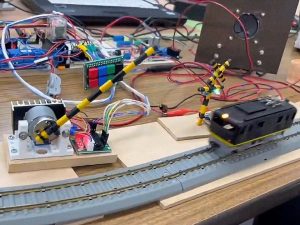
環状運転テスト
修理の後、レールを円状に繫いで電気を通し、環状運転を行った。試験のために車両をゆっくりと走らせ、各接続部分に異常がないか丁寧に確認した。
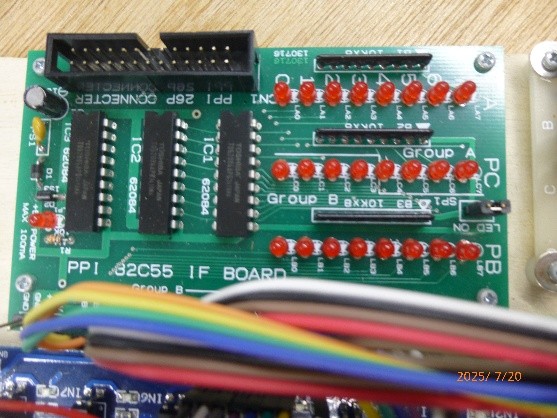
Legacy8080組立
鉄道模型の運行制御に使う8bitマイコンLegacy8080を組み立てた。このLegacy8080はWindowsなどと異なりOSを持たないため、外部制御に適している。また、外部制御インターフェース及び外部制御命令であるZB3-BASICを使用できる。ZB3-BASICには、PPI基板を介して外部から情報を取得するIN関数と、外部へ信号を送信するOUT命令が備わっており、これらを用いることで模型の位置検出や電車の走行、踏切の制御が可能となった。

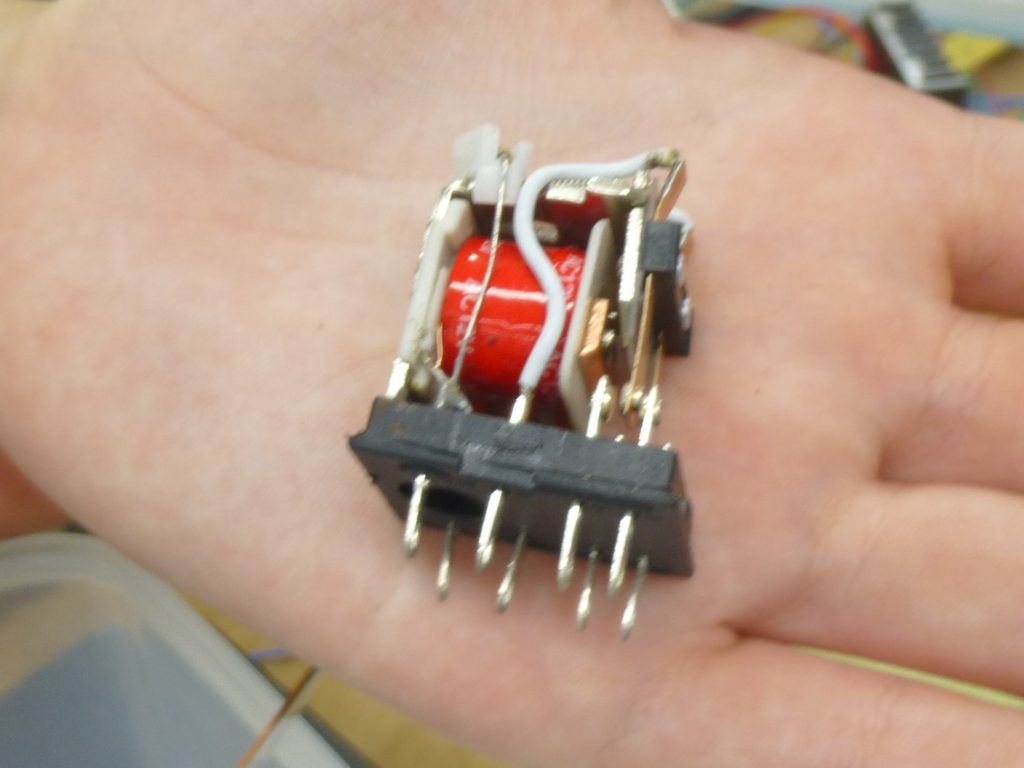
二極リレー
鉄道模型を前後進させるために、二極リレーを使用した。原理と構造を理解する目的で、そのうちの一つを分解して観察した。二極リレーを用いることで、二つの独立した接点を同時に切り替えることができ、模型の機関車の前進・後進の制御が可能となった。
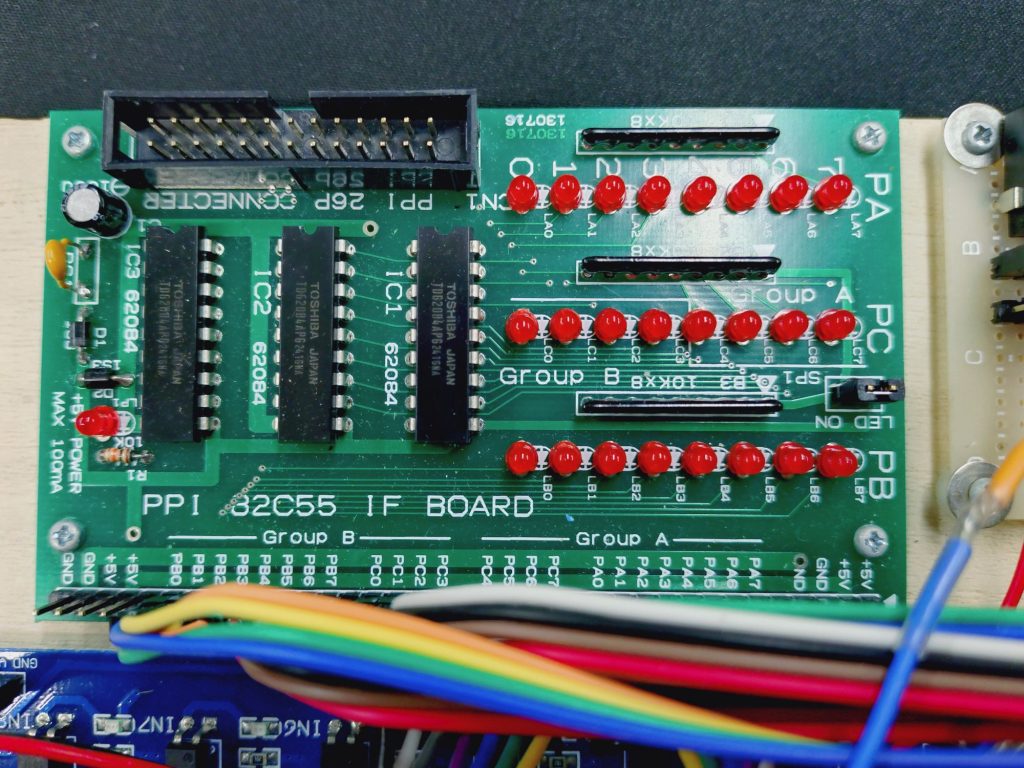
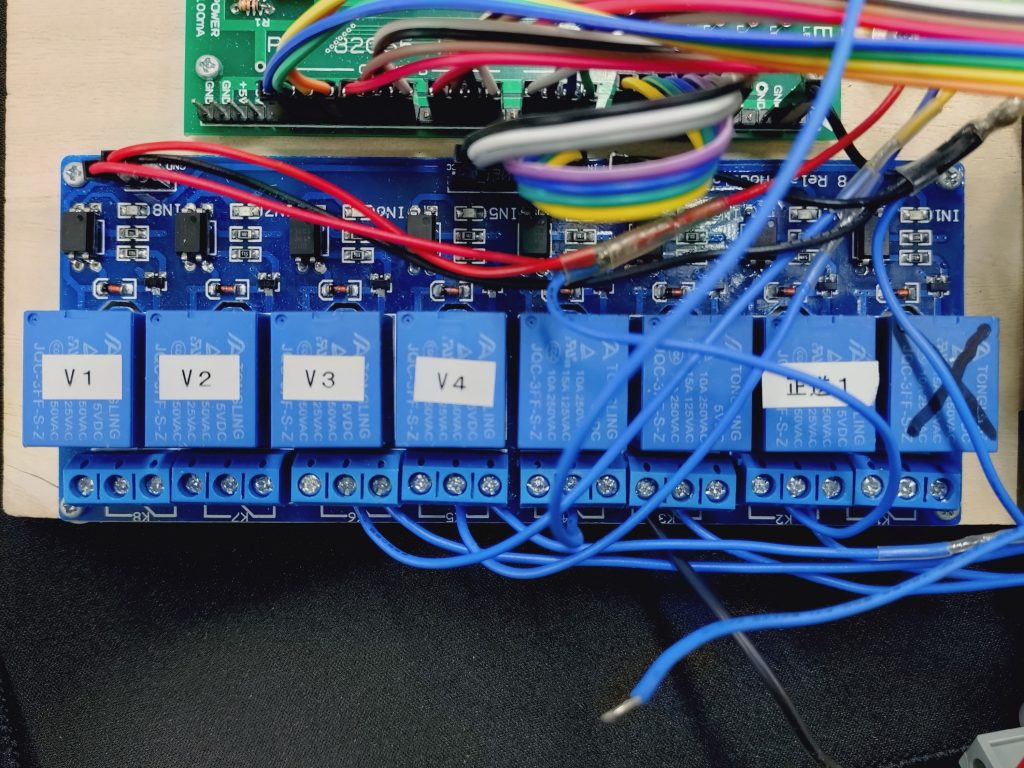
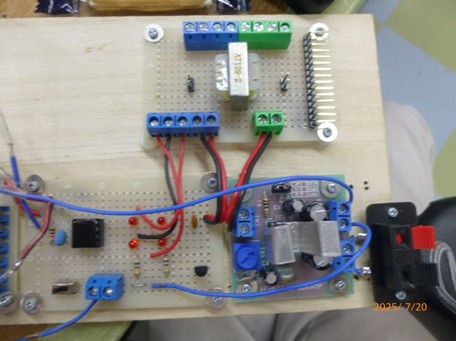
PPI基板と8chリレーボードの取付
PPI基板と二極リレー、及びリレー基板を木板に取り付け、各機器との配線を行った。リレー基板は8個のリレーが実装されたもので、模型の前進・後退の切り替え制御を担う。これと上記の二極リレーで警報機、アンプ、出力機器のオン・オフを制御する仕組みとなっている。
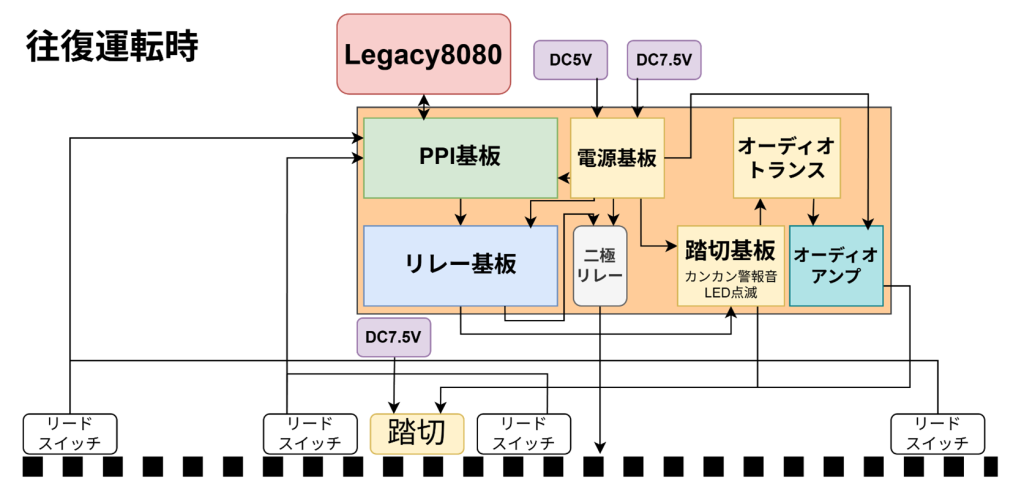
往復走行のプログラム
BASICを用いて鉄道模型が往復走行するよう制御し、模型車両には磁石を取り付けるとともに、線路脇に磁気センサを設置した。Legacy8080とWindowsPCを使用し、模型が磁気センサの横を通過した際に、線路に流す電流の向きを反転させるプログラムを作成した。
リードスイッチを用いた磁気センサの製作
模型の位置を検知して8bit マイコンLegacy8080に伝えるための磁気センサを製作した。小さい基板に磁石に反応するリードスイッチをつけ、それを使って模型の通過をLegacy8080に伝え、それでHOゲージの制御を行えるようにした。
停止制御
鉄道模型を停止するようなプログラムを作成し、磁気センサの位置で模型が止まるようにした。模型が磁気センサの位置に来た時に線路に送る電気を止める仕組みである。模型を停止させるためのプログラムと配線がとても複雑で、回路を考えるのに多くの時間をかけてしまった。
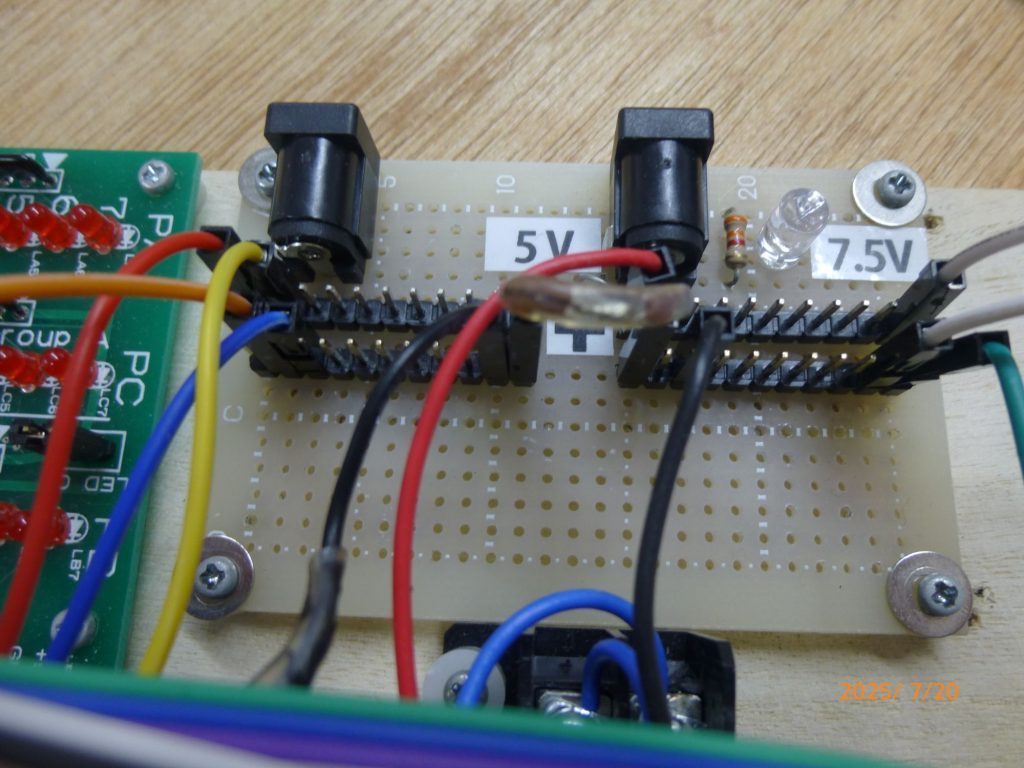
電源分配基板の製作
PPI基板の電源ピンが足りなくなり、7.5VのACアダプタから5Vの電源を取り出して各22本のピンを立てた電源基板を作った。これにより各基板への電源の分配が容易になり、利便性が大きく上がった。
踏切
電磁石制御の古い踏切を使用して、踏切を動作させた。踏切を分解し、内部構造の確認をして正常に動作するようにした。踏切の遮断機を列車の走行位置に応じて上下させるプログラムを作成した。それで、電磁石制御の踏切を使って電車が通った時に遮断機を下すことに成功した。
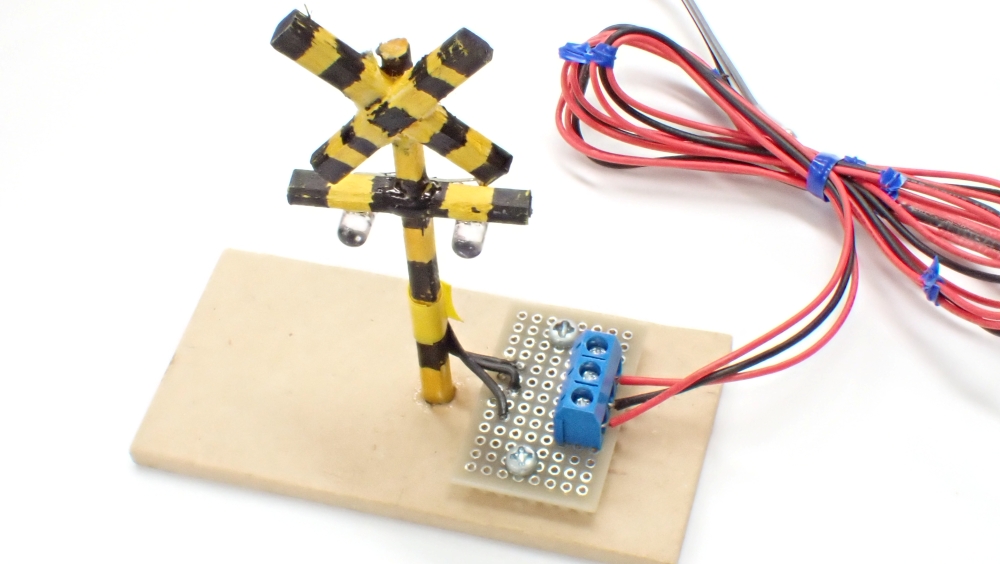
警報機の製作
割箸にマジックペンで色を塗って警報機と遮断機の棒を作った。しかし、警報機に付けるLEDの色を間違え、青白い光となった。
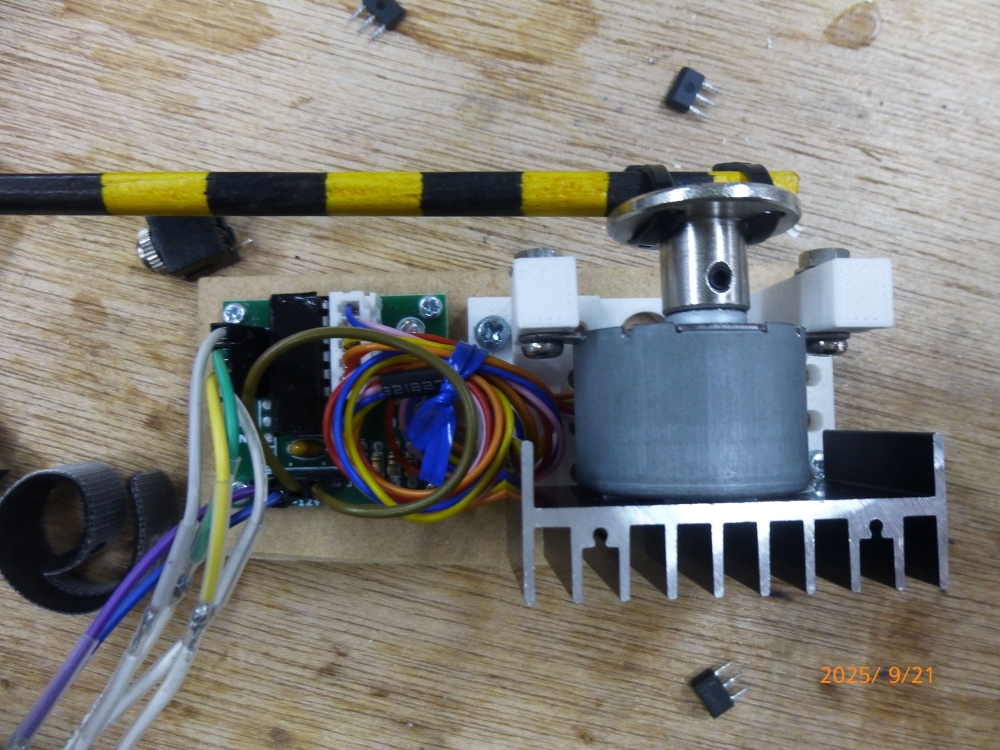
ステッピングモーターで遮断器
ステッピングモーターの原理を学び、遮断機を動かせるようにした。ステッピングモーターは消費電力が大きく、安定化電源を発熱させてしまった。そこで、別のACアダプタから電力を供給し、モーターにヒートシンクを熱伝導テープで取り付けることで問題を解決した。
警報音とスピーカー
踏切の作動時に警報音がようにするため、警報音基板を接続した。制作時、電解コンデンサの極性を間違えてつけてしまったため音声基板の電解コンデンサを破裂させてしまった。そのため、新しい基板を使って回路を作り直したが、警報音が非常に小さかったのでスピーカーに板をつけてトランスとオーディオアンプを挟むことで音の増幅を試みた。結果、聞こえるほどの音量にはなった。
手動制御スイッチ
動作確認の時に磁気センサをつけPPI基板につけて、それに磁石を近づけて反応させることが大変だったため、手動制御スイッチを作った(写真11)。これにより、動作確認の効率が向上した。

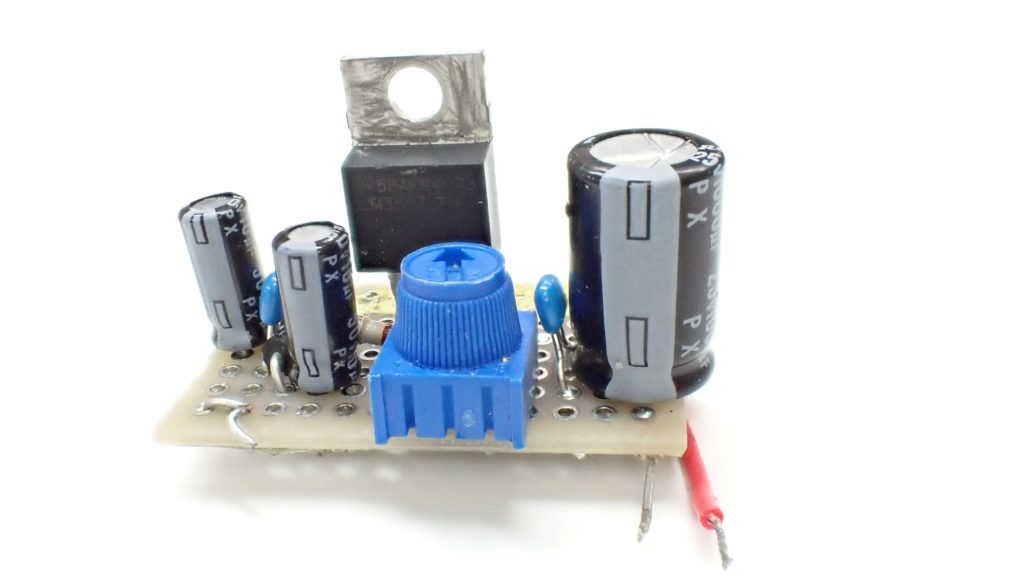
電源分配基板改良
電源分配基板には7.5Vと5VのAC アダプタを接続していたが、安定化電源を作って7.5V一本から5Vも取ろうとした。しかし、ステッピングモーターの消費電力が大きく、大きなヒートシンクをつける場所もなかったため、元の二本構成に戻した。


コメントを残す
コメントを投稿するにはログインしてください。