




HOゲージ自動運転#1 自動運転の準備
この記事は2024/06/08から2024/08/10までの実験結果です。
今回、HOゲージの自動運転では、
・鉄道模型の自動運転を通じてメカトロニクス制御の基本を学ぶ
・オープン制御とクローズド制御について学ぶ
という目標のもとに制作をした。

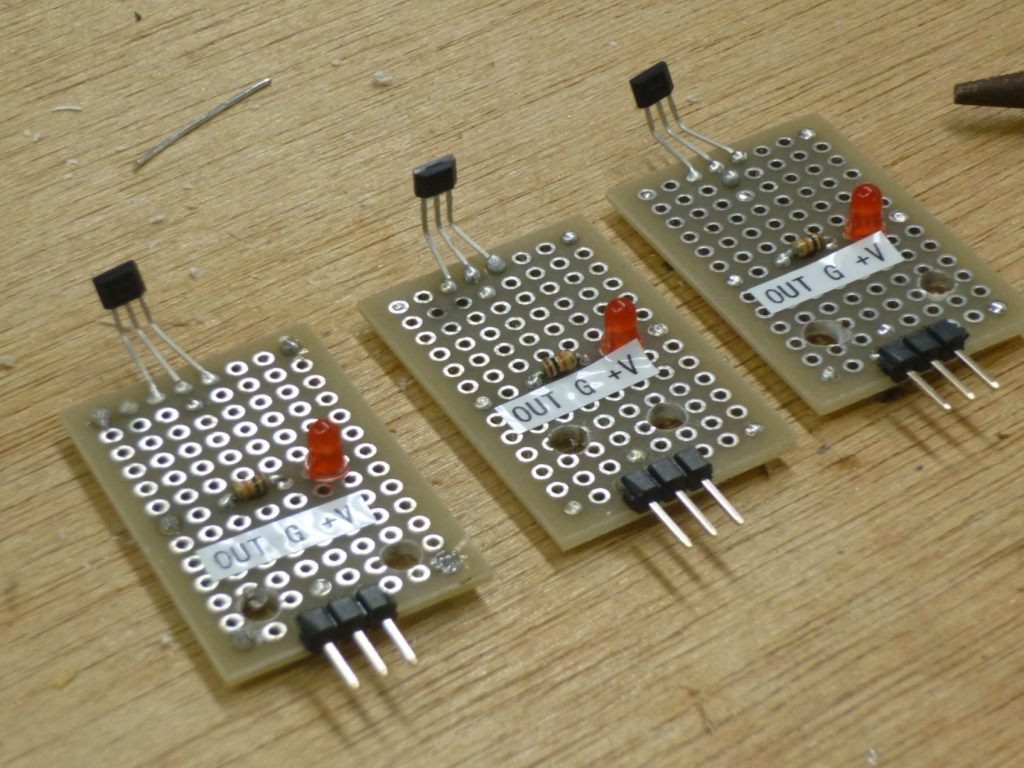
検知用のホールIC
走行中の列車の位置を検出するため、模型に磁石を貼りつけ、それをホールIC(磁石に反応するIC)で検知させることとした。しかし、ホールICを使うためにはUSBなどからの給電が必要且つ構造も複雑、反応が悪いなどの問題が多くあったことから位置の検知にはホールICでなく後述のリードスイッチを使うこととなった。
HOゲージの整備
走行試験の前に、動くものと動かないものとを確認した。結果、殆どの模型が動かない状態にあったため、分解して配線をし直したり掃除をしたりシリコンスプレーを吹いたりした。それにより全て動く状態になった。しかし、一年半ほど後に一部の模型は戻した時にネジが緩んでしまったのか自然崩壊してしまった。

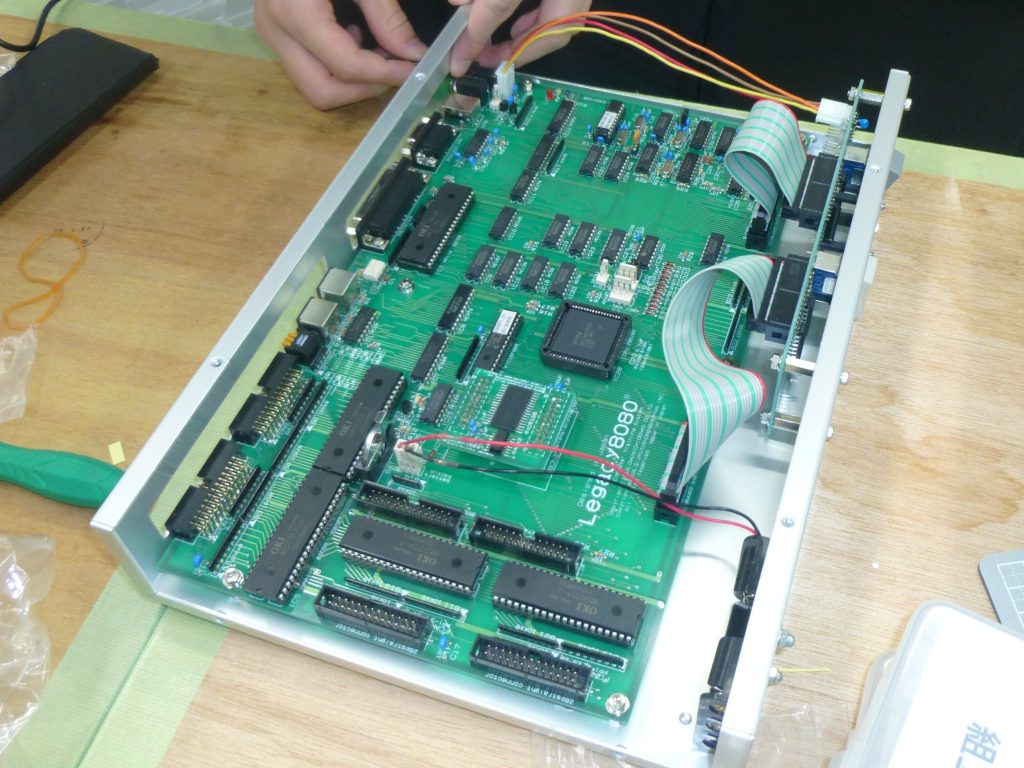
Legacy8080の組立
運行の制御のために使うコンピュータである、8bitマイコンLegacy8080を組み立てた。制作時には埃や静電気に細心の注意を払い、接続に間違いのないようにした。ケースの縁をやすりがけする作業は時間がかかったが、組み立て後には無事に動いた。
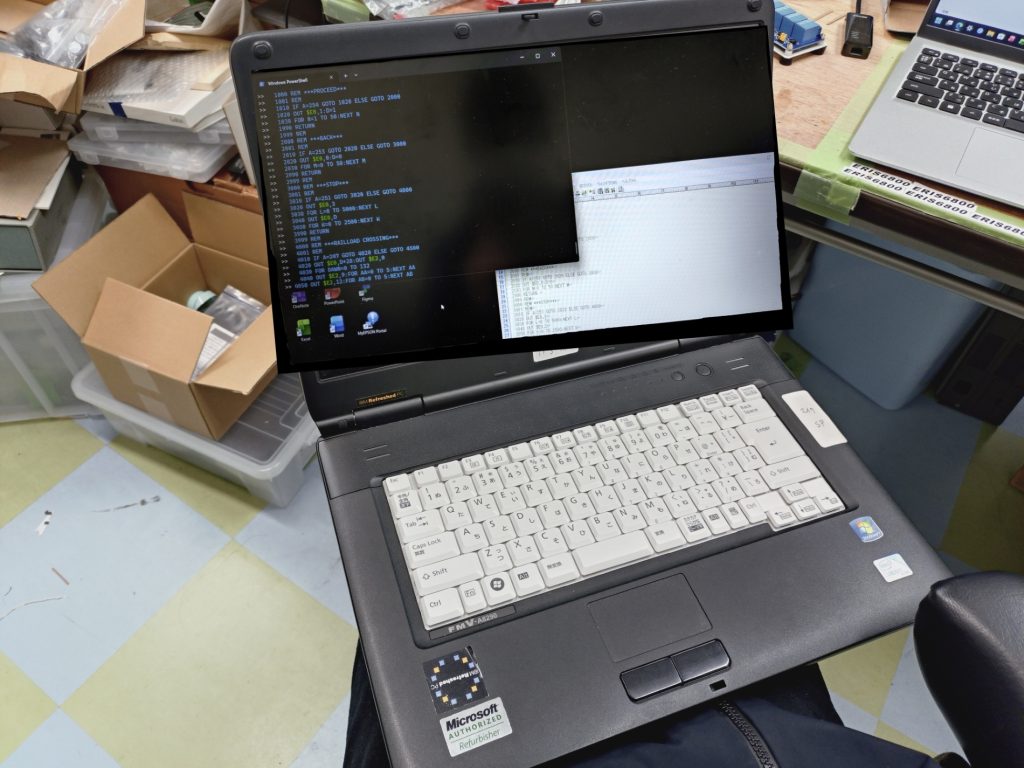
プログラム
Legacy8080のみではプログラムを作ることはできないため、Windows7の画面とキーボードを使って往復走行用のプログラムを作成した。初めは意味もわからず写していただけだったが、回数を重ね改良していく毎にプログラムの意味がわかるようになった。
運転テスト
レールを円形に繫ぎ、ただ電源装置から電気を流し、一方向のみに動かした(写真はイメージ)。直したおかげか全て正常に動作した。
往復運転のテスト動画です。https://youtu.be/Grdl0cw7mR4?si=2zs-OY1uQimy1ECy
この記事は2024/06/08から2024/08/10までの実験結果です。


コメントを残す
コメントを投稿するにはログインしてください。